Bohren
Bohren von produktabhängiger Anzahl von Bohrungen
IP: 192.168.0.4
Aufgabe
Ein Gehäuseunterteil ist mit bis zu 4 Bohrungen zu versehen. Hierbei wird abgefragt, ob es ohne Deckel und richtig herum liegt. Die Bohreinheit bohrt 2 Bohrungen in den linken Teil des Gehäuseunterteils, anschließend wird die Bohreinheit mit einer X-Achse nach rechts verfahren und die 2 weiteren Bohrungen werden gebohrt. Die Information dazu bringt das Produkt über seine Werkstückträger via RFID selbst mit.
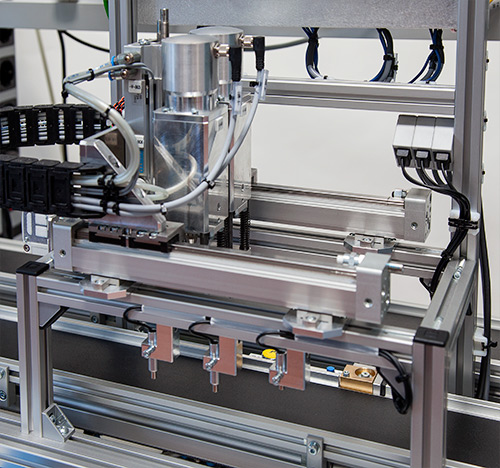
Zwei unabhängige Spindeln, die pneumatisch in Werkstückrichtung verfahren und abgesenkt werden, bohren die erforderlichen produktspezifischen Löcher.
Aufbau
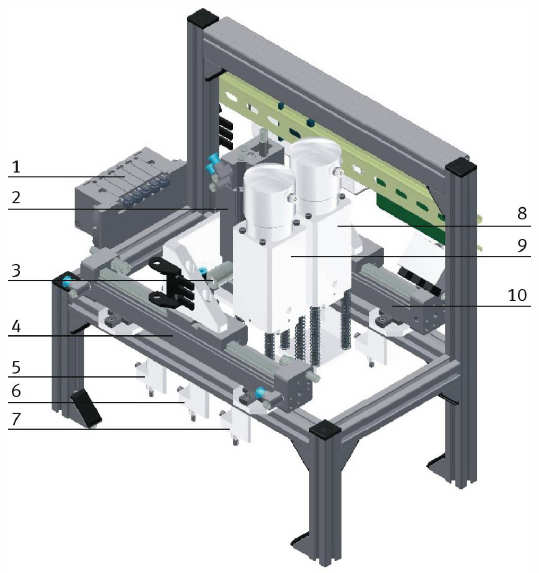
- Ventilinsel
- Z-Achse
- Z-Achse Klemmung
- X-Achse angetrieben
- Werkstückabfrage (Unterteil lagerichtig
- Werkstückabfrage (Kein Oberteil vorhanden)
- Werkstückabfrage (Werkstück vorhanden)
- Bohrmaschine 2
- Bohrmaschine 1
- X-Achse mitlaufend
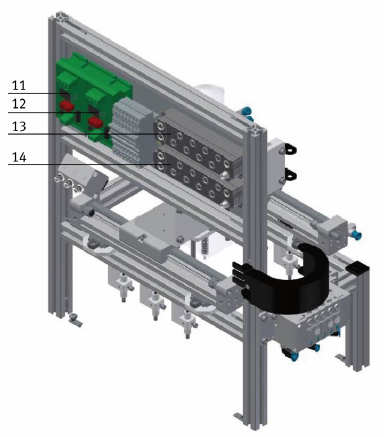
- Anlaufstrombegrenzer 1
- Anlaufstrombegrenzer 2
- EtherCat Module -XG1
- EtherCat Module -XG2
Ablauf
- Wird ein Werkstückträger mit einem Werkstück durch die Lichtschranke der Applikation Bohren befördert, wird der Werkstückträger gestoppt und ein Automatikablauf gestartet
- Das Werkstück wird abgefragt, es muß sich ein Gehäuseunterteil auf dem Werkstückträger befinden, es darf sich kein Gehäuseoberteil auf dem Unterteil befinden, die Lage des Unterteils muß richtig sein
- Die linken 2 Bohrungen werden gebohrt, die Bohrmaschinen werden eingeschaltet
- Die Bohreinheit fährt nach unten und bohrt 2 Bohrungen in das Gehäuseunterteil
- Die Bohreinheit fährt wieder nach oben
- Die X-Achse fährt auf die rechte Position
- Die Bohreinheit fährt nach unten und bohrt die Bohrung 3 und 4 in das Gehäuseunterteil
- Die Bohreinheit fährt wieder nach oben
- Die X-Achse fährt zurück in ihre Ausgangsposition
- Der Werkstückträger wird wieder entlassen und verläßt die Applikation
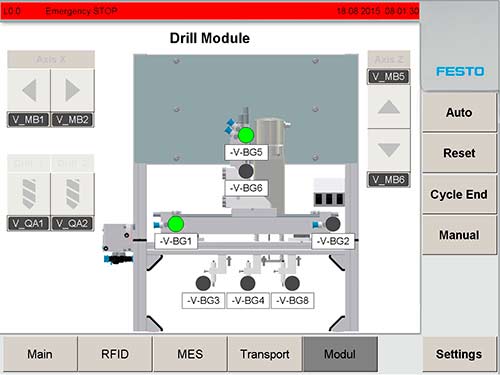
Bedienung
Technologie
| Art | Ausprägung |
|---|---|
| PLC | Beckhoff CX2030, TwinCat 3.1 |
| Feldbus | EtherCat |
| Antriebe | FU-gerichteter Bandlauf |